RTMaps Interface Blockset
Enabling full-stack prototyping across multisensor applications and hard real-time controllers
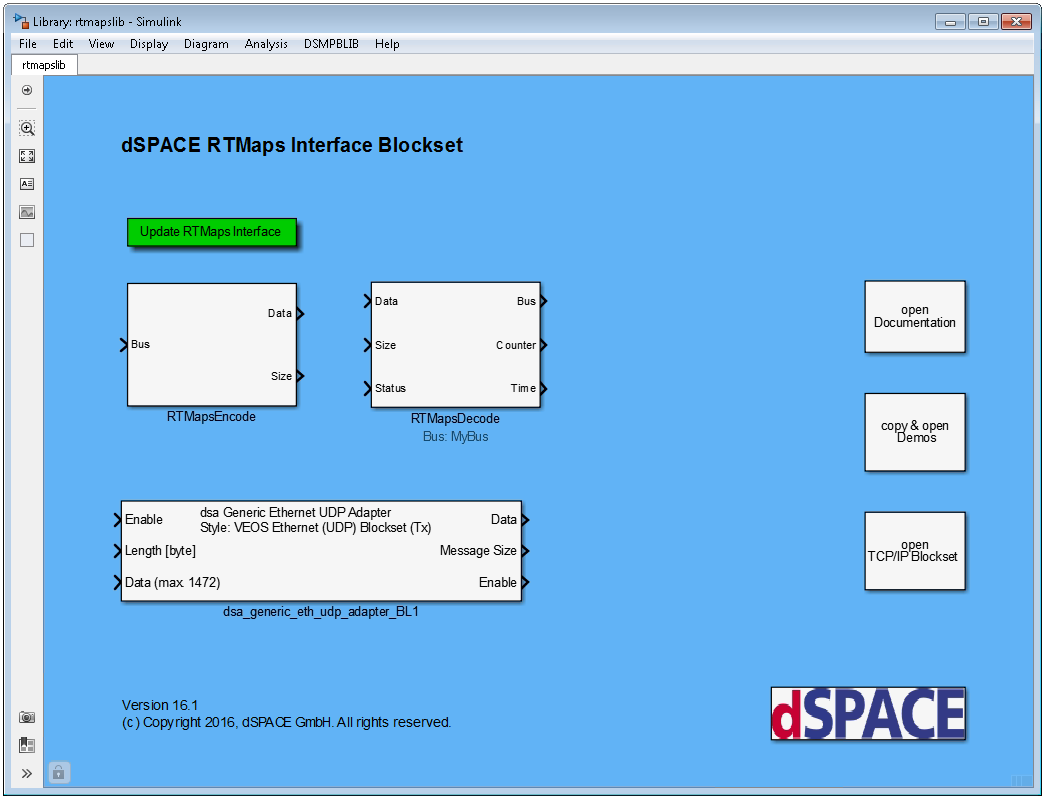
The dSPACE RTMaps Interface Blockset for Simulink® enables a bidirectional and low-latency UDP/IP communication between RTMaps from Intempora and dSPACE real-time systems or the PC-based simulation platform dSPACE VEOS.
- Simulink blockset for low-latency communication and clock synchronization between dSPACE platforms and RTMaps
- Recording and playback of time-correlated data
- Easy development of applications for ADAS and automated driving
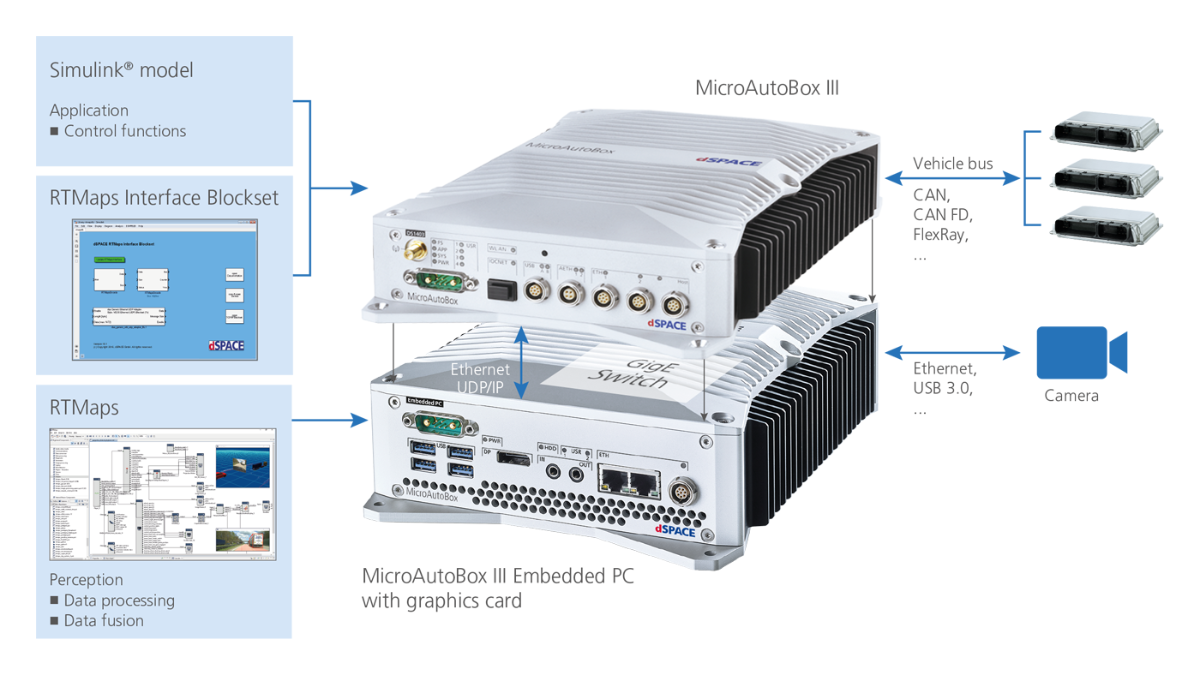
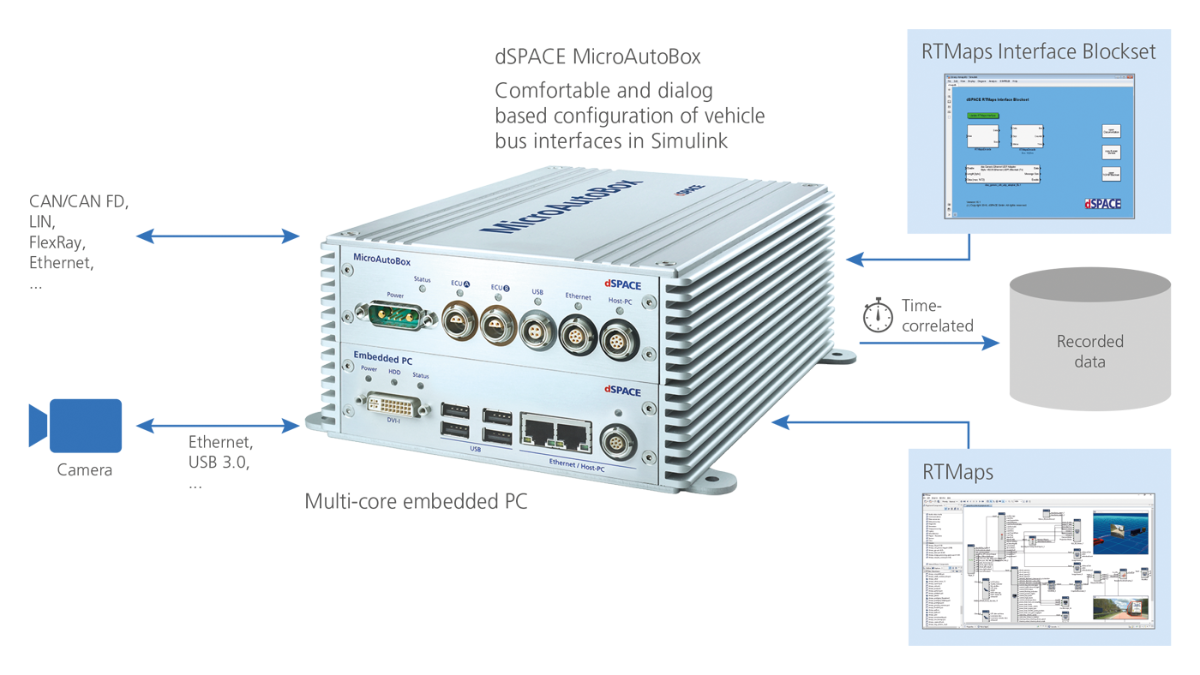
Recording and time correlation of camera and vehicle bus data.
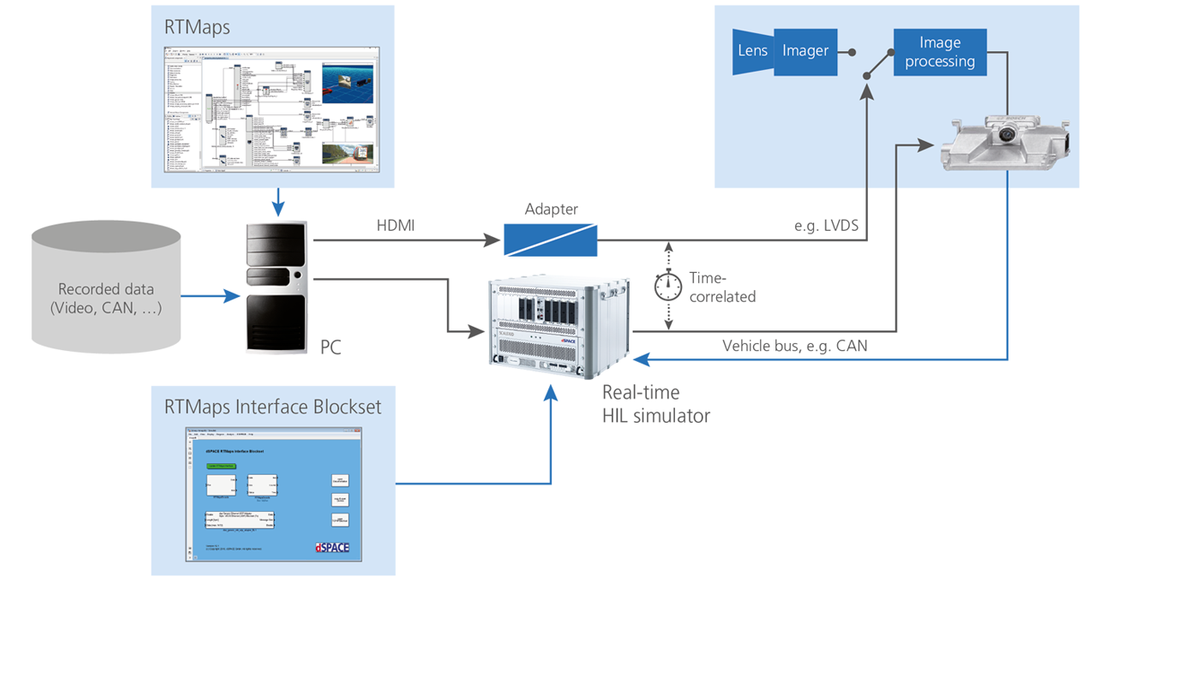
Open-loop HIL tests of electronic control units for image processing.



Application Areas
The conventional vehicle software stack is at its limits, as hard real-time controller-based prototyping is no longer sufficient for advanced driving assistance systems and autonomous driving (ADAS/AD). As a result, two prototyping worlds arose, where one is dedicated for perception and data fusion, and the other is aimed at hard real-time execution.
Typically, data processing and fusion algorithms are implemented in a high-level programming language such as C++, while the development of application functions rests on the model-based design approach using MATLAB®/Simulink® and dSPACE real-time systems. RTMaps from Intempora is an established tool with an unparalleled performance for prototyping C++-based multisensor applications by using block diagrams. In addition, RTMaps provides capabilities to precisely time-stamp, record and play back data.
The dSPACE RTMaps Interface Blockset connects dSPACE platforms, such as dSPACE real-time systems, or VEOS with RTMaps via UDP/IP.
Key Benefits
The dSPACE RTMaps Interface Blockset provides a bidirectional, low-latency communication via UDP/IP between RTMaps from Intempora and dSPACE real-time systems or the PC-based simulation platform dSPACE VEOS. In just a few steps, developers can connect their applications in Simulink to the appropriate communication blocks via signal buses and establish data connections to multisensor applications in RTMaps. The required description of the data to be transmitted or received is generated as an XML file from the corresponding signal buses in Simulink at the push of a button. In addition, the blockset allows the clock in RTMaps to be synchronized with the simulation time or the real-time clock on dSPACE platforms. This makes it possible, for example, to capture, record, and precisely time-correlate vehicle bus data on dSPACE MicroAutoBox and camera data in RTMaps. A further use case is the open-loop (data replay) test of ECUs for image processing. In this use case, RTMaps on a PC serves to play back time-correlated video and bus data, while the bus signals are sent to a hardware-in-the-loop (HIL) system. This ensures a low-jitter restbus simulation.
The RTMaps Interface Blockset establishes a powerful connection between RTMaps and dSPACE platforms and facilitates the development and testing of perception and application algorithms for ADAS and automated driving.
| Functionality | Description |
|---|---|
| General |
|
| Ethernet communication |
|
-
- View online
- Download
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.