How many Environmental Sensors are needed?
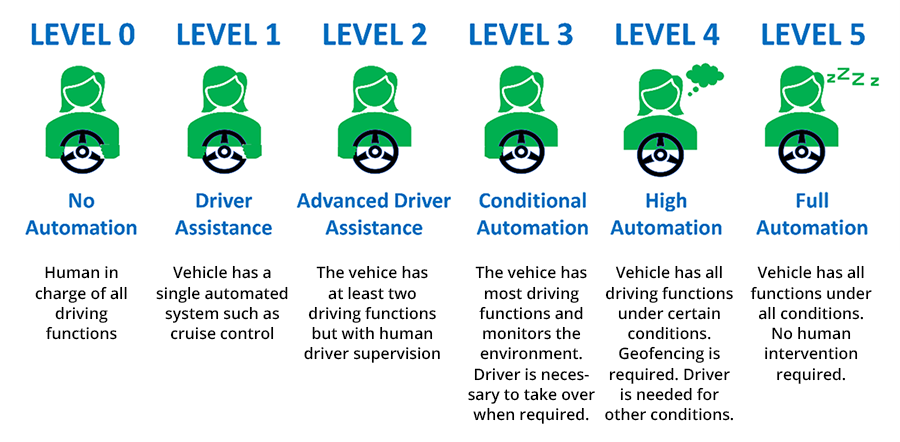
In the next few years, companies in the automotive, agricultural, mining, and other automated vehicle industries will accelerate their activities to achieve autonomy levels 3 and 4. To achieve these autonomy levels, the number of perception sensors must be significantly increased. Basically, it is time for stakeholders to try to answer the question, "How many environmental sensors are needed to achieve autonomy levels 3 and 4, and what are the new challenges? "
Do not underestimate the Challenge of developing Multisensor Applications
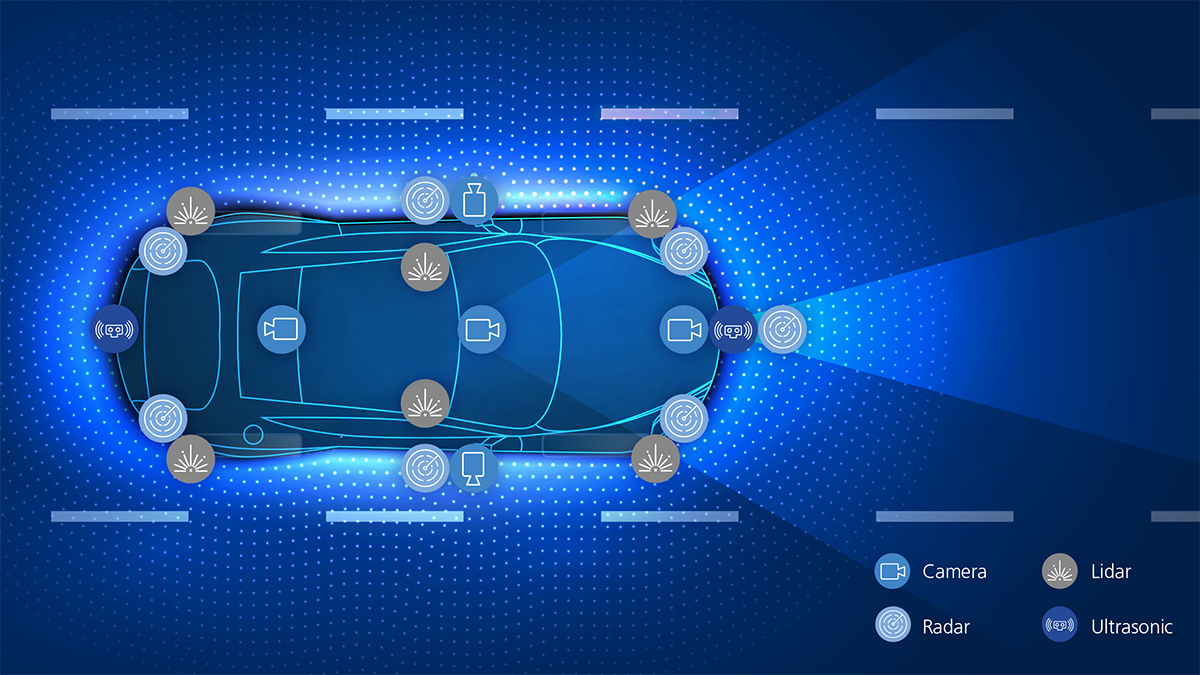
The manufacturers (OEMs) are already equipping their vehicles with the necessary hardware required for high automation in the future. They estimate that 20-30 sensors will be required to achieve this goal. This means that vehicles will increasingly be equipped with many cameras, radar, lidar, audio, ultrasound, GPS/GNSS, and other environmental sensors. These sensors will have different sampling rates, data interfaces, and data formats. In addition, various departments, teams, partners, and specialists are involved in the development of complex software (SW) functionalities. Therefore, the challenge of developing multi-sensor applications for use in vehicles should not be underestimated.
Requirements for the Development of ADAS/AD Applications
Interfaces for sensors and I/O devices
ADAS/AD developers must develop interfaces for sensors and buses to access data from these sources in a format that can be adopted by downstream components. Engineers and developers must develop efficient and versatile tools for raw and high-bandwidth data acquisition, data processing, data synchronization, and data fusion.
Rapid prototyping and production implementation
What are nice prototypes good for if they can't be deployed in production environments? This is the situation that plagues many ADAS/AD software development teams. Many engineers use open-source software (OSS) such as the Robot Operating System (ROS). These tools lack support for functional safety standards such as ISO 26262 for automotive, ISO 25119 for agriculture, ISO 219014-1 for earthmoving equipment and others. In addition, there is no solid support for standards such as CAN, CANFD, Ethernet, etc.
Collaboration
Collaboration across teams and with partners is an important element of developing state-of-the-art applications. This requirement is more critical for multi-national companies where project teams might be in different geographical locations. Collaboration between different partners, teams, and specialists requires an easy-to-use software development framework for all. The framework should ideally provide an intellectual property (IP) protection allowing co-development with partners without IP exposure risks. In addition, the platform should also support varying programming languages such as Python and Simulink.
Re-using codes/algorithms
The development of algorithms for ADAS/AD is a resource-hungry exercise. Essentially, it is important that the code/algorithms developed can be reused in other projects and in the future. Additionally, reliable applications require unified code templates and coding guidelines for high maintainability of SW functions. Achieving this goal can be potentially difficult when using OSS from different developers. Component-based programming allows for components to be reused in a stable manner, which makes it easy to not only reuse code but also share.
Ease of debugging applications
ADAS/AD projects are complex and require multiple applications for successful implementation. Still, speed is of the essence and bringing applications to market fast is critical. In essence, the capability of debugging applications quickly is crucial. This reduces the time needed to develop, test, and deploy applications.
RTMaps as an ADAS/AD Software Development Platform
Real Time Multi-Sensor Applications (RTMaps) is a software development platform from early prototyping to production. It allows development teams to accelerate software development by taking advantage of the following RTMaps features.

From Prototyping to Production
The process of developing functional ADAS/AD applications is slowed because of the challenge deploying applications to production. Many of the existing solutions such as ROS are not production-ready. High-latency, non-deterministic behaviour, and lack of functional safety support are some of the major stumbling blocks when using OSS. RTMaps is production-ready and allows users to develop their applications on Linux or Windows and deploy these applications to RTOS such as QNX. It also allows hardware abstraction with RTMaps running in X86 and ARM-based devices.

Software Development Complexity reduction
Although scripting in RTMaps is possible, the capability of component-based development is vital in reducing software development complexity. Component-based development simplifies application debugging, testing, and collaboration within teams. Additionally, it reduces testing complexity by allowing easier requirement definition and testing the behaviour of an application by subjecting it to different inputs.
ISO 26262 Certification
For safety-critical applications, such as in the automotive industry, homologation is a requirement. For the automotive industry, ISO26262 is the standard that must be met. While the entire framework of an automated vehicle must be certified, it is important that the middleware is already certified, reducing the resources and efforts required to obtain certification. With the upcoming certification of RTMaps up to ISO26262 ASIL-B, users can execute multi-core functions safely in different RTOS such as QNX and Embedded Linux, handle data in a zero-copying approach, generate RTMaps components from the dSPACE production code generator TargetLink, and monitor latencies of different components.
600+ Sensor and I/O Components
A platform that has many components that allow connection of sensors such as lidar, radar, camera based on buses such as CAN, CANFD, Ethernet is invaluable. In many cases, OSS such as ROS will have nodes or interfaces developed by the community. Especially for software prototyping, RTMaps provides a ready-to-use interface to ROS, allowing both applications to be connected easily. However, using OSS for production development normally requires significant investment of resources to validate and maintain these components. RTMaps has over 600 components out of the box that have been professionally developed and maintained. In addition, the RTMaps AI store gives users access to state-of-the-art AI models developed by partners.
In essence, RTMaps is the ideal platform for accelerating the development of ADAS/AD applications allowing a faster path to market at reduced overall costs.